- Главная
- Вопросы и ответы
- Омпания Boston Dynamics («Бо́стон Дайнéмикс») разрабатывает роботов. Наиболее известен робот BigDog (Биг-Дог, или робопёс), который передвигается на 4 конечностях, и человекоподобный робот Atlas (Атлас), который передвигается на 2 конечностях. В испытании были задействованы оба вида роботов, всего 15 штук, и все вместе они передвигались на 38 конечностях. Сколько двуногих роботов было задействовано в испытании? Ответ:
Ответ:
4 робота на 4 конечностях.
11 роботов на 2 конечностях.
Пошаговое объяснение:
Допустим, было 4 робота на 4 конечностях. Всего конечностей получается 16(4*4=16). У нас остается свободных еще 11 роботов(15-4=11) и 22 конечности(38-16=22). И если было 11 роботов на 2 конечностях, то получается 22 конечности(11*2=22).
Не зная, как решать правильно, решил методом подбора. Надеюсь, помог :).
![]()
8
рый передвигается на 4 конечностях, и человекоподобный робот Atlas (Атлас), который передвигается на 2 конечностях. В испытании были задействованы оба вида роботов, всего 15 штук, и все вместе они передвигались на 38 конечностях. Сколько двуногих роботов было задействовано в испытании?
Ответ:
1 ответ:
![]()
0
0
Ответ:
4 робота на 4 конечностях.
11 роботов на 2 конечностях.
Пошаговое объяснение:
Допустим, было 4 робота на 4 конечностях. Всего конечностей получается 16(4*4=16). У нас остается свободных еще 11 роботов(15-4=11) и 22 конечности(38-16=22). И если было 11 роботов на 2 конечностях, то получается 22 конечности(11*2=22).
<u><em>Не зная, как решать правильно, решил методом подбора. Надеюсь, помог :).</em></u>
<u><em></em></u>
<u><em></em></u>
Читайте также
![]()
1. 40-30=10 (разница в общем пути)
2. 10-5=5 ( разница с выходом малыша)
3. 5:5=1
Ответ: карлосон догонит малыша через 1 минуту.
![]()
2,5х-2х=-13-12
0,5х=-25
х=-25/0,5
х=-50
![]()
<span>Для закладки сада заготовили 100 яблонь.</span>
1)5*16=90(ябл.)-в 5 рядах
2) 128-90=10 (ябл.)
Ответ:10 яблонь осталось посадить, т.е почти 1 ряд
![]()
(x+27):12=16х+27=192
х=165
![]()
А) 4/7- связала, 3/7 осталось
б)3/7 — связала, 4/7 осталось
в)6/7 связала, 1/ 7 осталось
OBRAZOVALKA.COM
OBRAZOVALKA.COM — образовательный портал
Наш сайт это площадка для образовательных консультаций, вопросов и ответов для школьников и студентов .
На вопросы могут отвечать также любые пользователи, в том числе и педагоги.
Консультацию по вопросам и домашним заданиям может получить любой школьник или студент.
Омпания Boston Dynamics (Бостон Дайнмикс) разрабатывает ботов. Наиболее известен бот BigDog (Биг-Дог, или робопёс), который передвигается на 4 конечностях, и гуманоидоподобный бот Atlas (Атлас), который передвигается на 2 конечностях. В испытании были задействованы оба вида ботов, всего 15 штук, и все вкупе они передвигались на 38 конечностях. Сколько двуногих ботов было задействовано в испытании?
Ответ:
Задать свой вопрос
1 ответ
![]()
2019-09-25 17:31:02
Ответ:
4 бота на 4 конечностях.
11 роботов на 2 конечностях.
Пошаговое разъяснение:
Допустим, было 4 бота на 4 конечностях. Всего конечностей получается 16(4*4=16). У нас остается свободных еще 11 ботов(15-4=11) и 22 конечности(38-16=22). И если было 11 ботов на 2 конечностях, то выходит 22 конечности(11*2=22).
Не зная, как решать верно, решил способом подбора. Надеюсь, посодействовал :).
-
Вопросы ответы
Добро пожаловать!
Для того чтобы стать полноценным пользователем нашего портала, вам необходимо пройти регистрацию.
Авторизоваться
Уже зарегистрированны? А ну-ка живо авторизуйтесь!
Войти на сайт
Главная » Математика — 5 — 9 классы
или робопёс), который передвигается на 4 конечностях, и человекоподобный робот Atlas (Атлас), который передвигается на 2 конечностях. В испытании были задействованы оба вида роботов, всего 15 штук, и все вместе они передвигались на 38 конечностях. Сколько двуногих роботов было задействовано в испытании?
Ответ №1
Ответ:
11 двуногих роботов
Пошаговое объяснение:


BigDog стал первым роботом Boston Dynamics, получившим широкую известность. Во многом именно он «сделал имя» своей компании-создателю. Робот для военных, от которого отказались военные, и первый робот Boston Dynamics, которого на камеру пинали разработчики.
Сейчас на проекте поставлен крест, но он стал основой для последующих разработок компании — Cheetah и новых Spot, видео с которыми быстро стали вирусными.
Сегодня попытаемся разобраться в устройстве BigDog со слов его разработчиков. Оригинальную статью авторы опубликовали еще в 2008 году, но она до сих пор (вроде как) не была переведена на русский. В ней рассказано о главных компонентах робота и алгоритмах, координирующих его походку.
Цель проекта BigDog — создание автономных устройств с ногами с возможностью движения по пересеченной местности. Они должны превосходить существующие колесные и гусеничные транспортные средства. Идеальная система должна проходить везде, куда может пойти человек или животное, бежать в течение многих часов и нести вес в виде собственного топлива и полезной нагрузки. Она достаточно умна, чтобы пересекать местность с минимальным человеческим вмешательством и управлением.
Созданные роботы BigDog помогли сделать несколько шагов для достижения этих целей, хотя впереди еще много работы.
У BigDog есть бортовые системы, которые обеспечивают питание, приведение в действие, сбор данных о среде, контроль и коммуникацию. Питание поставляет охлаждаемый водой двухтактный ДВС, который обеспечивает порядка 15 л.с. Он приводит в движение насос, который доставляет гидравлическое масло через систему фильтров, коллекторов, аккумуляторов к актуаторам роботических ног. Актуаторы представляют собой низко-фрикционные гидравлические цилиндры, регулируемые двухступенчатыми сервоклапанами. У каждого актуатора есть сенсоры, которые контролируют положение сустава и силу. У каждой ноги — 4 гидравлических актуатора, которые питают суставы. Теплообменник, установленный на корпусе BigDog, охлаждает масло, а радиатор охлаждает двигатель для устойчивости операций.
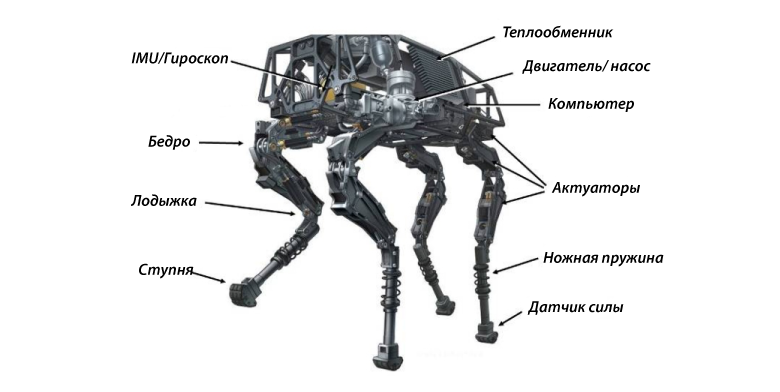
Основные элементы конструкции BigDog
Бортовой компьютер контролирует поведение BigDog, управляет сенсорами и отвечает за коммуникацию с удаленным оператором. Он также записывает большое количество инженерных данных для анализа производительности, анализа ошибок и операционной поддержки.
У BigDog порядка 50 сенсоров. Инерционные датчики измеряют позицию и ускорение тела, датчики суставов измеряют движение и силу суставных актуаторов. Бортовой компьютер обрабатывает информацию от всех этих датчиков, чтобы дать оценку того, как движется робот. Еще одна группа сенсоров контролирует гомеостаз BigDog: гидравлическое давление, потоки и температуру, скорость двигателя и пр.
Бортовой компьютер выполняет как низко-, так и высокоуровневые контролирующие функции. Низкоуровневая система контролирует положение сервоприводов и питание в суставах. Высокоуровневая координирует положение ног для регуляции скорости, положения и высоты тела во время передвижения. Она также отслеживает силу взаимодействия с землей, чтобы обеспечить устойчивое движение.
BigDog имеет множество вариантов движения. Он может вставать, приседать, ходить ползучей походкой, ходить, поднимая только одну ногу за раз, идти рысью и галопом. Скорость при ползущей походке составляет 0,2 м/с, для рыси — 1,6 м/с, для бега — 2 м/с (в лабораторных условиях максимальный показатель скорости составил 3,1 м/с). Кроме того, робот умеет прыгать на 1,1 м.
BigDog обычно контролируется человеком-оператором, который работает с блоком управления, соединенным с роботом через IP-радиоприемники. Оператор осуществляет высокоуровневое управление движением и скоростью. Он также может приказать роботу запустить или остановить двигатель, встать, сесть, идти или перейти на бег.
[О том, как разрабатывался алгоритм автономной навигации для робота, можно прочитать здесь]
В робота интегрировали систему стереозрения и лидар. Система стереозрения, разработанная Jet Propulsion Laboratory, состоит из пары стереокамер, компьютера и зрительного ПО. Она используется для получения 3D-формы ландшафта впереди робота и нахождения им пути. Лидар нужен, чтобы BigDog мог следовать за человеком без дополнительных команд оператора.
Контролирование походки
Чтобы двигаться со скоростью человека, BigDog использует динамически уравновешенную походку рысью. Он балансирует, используя боковую скорость и ускорение, определяемые по ощущаемому поведению ног в сочетании с инерционными датчиками.
Система управления BigDog координирует кинематику и наземные реакции робота, реагируя на основные постуральные команды. Контроллер распределяет нагрузку между ногами, чтобы оптимизировать их несущую способность. Вертикальная нагрузка на конечности поддерживается как можно более равномерной, а отдельные ноги генерируют наземные реакции, направленные на бедра, чтобы снизить трение.
Алгоритм координации походки, ответственный за коммуникацию между конечностями, запускает движение ног. Его координирует модель виртуальной ноги. Общую схему контроля ходьбы BigDog можно представить так:
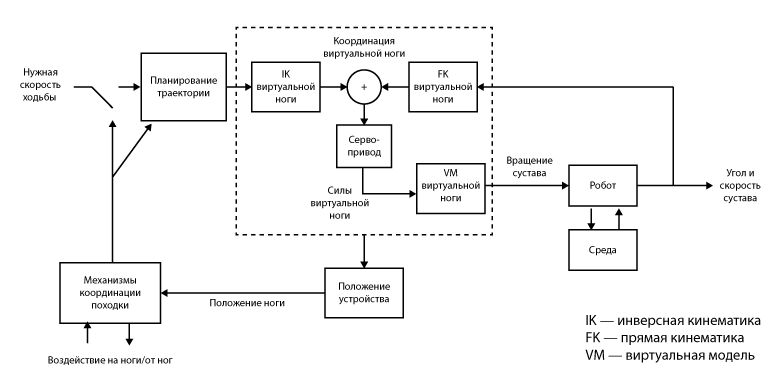
Схема контроля ходьбы BigDog
Мы разработали алгоритмы ходьбы для неровной местности и протестировали их в физическом моделировании перед тестированием на роботе. Моделируемый робот ходит по склонам под углом до 60 градусов. Алгоритм его движения меняется в зависимости от того, идет он по ровной поверхности или по склону. Кроме того, он учитывает неожиданные препятствия на пути, такие как камни или ямы.

Физическое моделирование использовалось при разработке алгоритмов походки
Система управления использует информацию с суставного датчика, чтобы определить, находятся ли «ноги» в настоящий момент на земле и определить нагрузку на каждую конечность и привод. Алгоритм состояния контролирует положение тела, координируя кинематику конечностей с силами реакции ног, контактирующих с землей. Алгоритм состояния реализует правильное движение ног на неровной поверхности. Это позволяет контролировать повороты, шаг и высоту тела относительно земли, тем самым давая возможность BigDog адаптироваться к изменениям ландшафта без датчиков более высокого уровня восприятия местности.
BigDog адаптируется к местности двумя способами. Он регулирует высоту и отношение тела к ландшафту и контролирует, куда ставить ноги. При подъеме и спуске со склонов тело робота наклоняется. Крутые склоны (более чем 45 градусов) робот преодолевает, корректируя походку и используя более мелкие шаги.
В конце статьи авторы поименно благодарят всех 23 человек из команды BigDog и делятся планами на будущее: укрепить корпус робота, сделать BigDog автономным и сделать его работу тише (бензиновый двигатель шумит как мотоцикл). Последний пункт, как показало время, так и остался серьезной проблемой.
Больше интересного о робототехнике — на robo-hunter.com:
- свежие новости;
- обзоры;
- интервью с разработчиками;
- инфографика;
- видео.
Только зарегистрированные пользователи могут участвовать в опросе. Войдите, пожалуйста.
Нужен ли перевод про разработку алгоритма навигации BigDog?
5.46%
нет, прочитаю в оригинале
13
Проголосовали 238 пользователей.
Воздержались 38 пользователей.
Как компания стала самым известным производителем роботов, не создав ни одной коммерческой модели, и что ждет Boston Dynamics в будущем
Сегодня компания Boston Dynamics известна во всем мире благодаря роликам на YouTube, в которых ее роботы карабкаются по склонам, пытаются устоять на льду, преодолевают препятствия и терпят побои клюшками от разработчиков.
Основатель компании Марк Рэйберт с 1980-х годов занимается разработкой роботизированных конечностей. В 1986 году он создал одноногого робота, который мог сохранять равновесие, прыгая на своей ноге. Это разработка стала большим шагом в роботостроении, а идеи, воплощенные Рэйбертом, потом пригодились в Boston Dynamics.
Компания была создана в 1992 году, когда Рэйберт еще работал в лаборатории LegLab Массачусетского технологического института (MIT). В компании работали и другие специалисты из этой лаборатории. С 1995 года компания полностью отделилась от университета.
За пределами профессионального круга Boston Dynamics прославилась, когда представила в 2005 году четвероногого робота BigDog, разработанного по заказу DARPA.
Эволюция моделей компании
BigDog

Почти все роботы Boston Dynamics заимствуют какие-то принципы движений у животных или человека. Разработчики отражают это сходство и в самих названиях моделей.
Робот BigDog был разработан для армии США и должен был помогать солдатам перетаскивать снаряжение и припасы по бездорожью, где не проехать даже на гусеничном транспорте.
Характеристики BigDog были уникальными. Робот мог переносить до 150 кг и подниматься в гору с уклоном до 35 градусов. Скорости для пеших переходов было тоже вполне достаточно — до 6,4 км/ч.
Проблемой для военных оказались шумный двигатель и высокая цена модели. Дело в том, что первые роботы компании имели бензиновые двигатели внутреннего сгорания, и тогда сделать робота менее шумным не удалось. Армия не взяла BigDog на вооружение, и компания закрыла разработку модели в 2015 году. Однако многие технические наработки нашли применение в последующих моделях роботов.
Spot
Следующий четвероногий друг от Boston Dynamics получил название Spot. Благодаря электрическому двигателю он передвигался гораздо тише BigDog. Кроме того, он был меньше и устойчивее старшего собрата. Однако использовать Spot для переноски больших грузов нельзя.
Cheetah
Cheetah — еще один робот, сделанный по заказу DARPA. Как следует из названия (cheetah в переводе с английского — гепард), этот робот очень быстрый. Он тоже передвигается на четырех конечностях и за счет изгибающейся конструкции спины способен развить скорость до 45,06 км/ч. Однако этот робот все-таки был экспериментальной моделью, так как питался от стационарного источника и не мог передвигаться автономно.
WildCat
WildCat — модель, построенная на базе Cheetah, получившая возможность передвигаться автономно. Благодаря довольно большой скорости перемещения — до 25,7 км/ч, робот может стать хорошим вариантом для разведывательных операций.
SandFlea
Среди разработок Boston Dynamics есть не только большие роботы, но и более компактные механические насекомые.
SandFlea — робот на радиоуправлении, передвигающийся на четырех колесах. Он умеет подпрыгивать в высоту до 9 метров. Устройство, подбрасывающее SandFlea вверх, работает на сжатом газе и делает робота похожим на блоху. Газового баллона хватает на 25 прыжков. SandFlea может легко перепрыгивать высокие стены и другие препятствия, поэтому вполне подходит для ближней разведки.
Petman
Вообще в Boston Dynamics несколько скептически относятся к антропоморфным роботам. Марк Рэйберт считает, что без особой надобности делать робота похожим на человека не стоит.
Petman — это первая антропоморфная разработка компании. Робот был создан для испытания химзащитных костюмов, и именно поэтому разработчики старались сделать его максимально похожим на человека и внешне, и в плане движений.
Atlas
Двуногий робот Atlas способен передвигаться по пересеченной местности. Впервые модель была представлена в 2013 году. Робот умело передвигается на двух ногах и сохраняет равновесие, даже если его пинают. Руками он может переносить небольшие грузы, а также открывать двери.
SpotMini
SpotMini является уменьшенной версией робота. Это самый тихий робот компании, а заряда аккумулятора достаточно для автономного движения в течение полутора часов. Вдобавок к четырем ногам разработчики приделали к SpotMini механическую руку, которая напоминает голову животного на длинной шее. Рука позволяет роботу аккуратно брать и переносить небольшие предметы и вставать после падений.
Handle
Handle — это уникальный робот, к двум нижним конечностям которого прикреплены колеса, позволяющие ему двигаться с большой скоростью (до 4 м/с) и подпрыгивать более чем на метр. Верхними конечностями робот способен поднимать и переносить предметы.
Благодаря сочетанию антропоморфности и способности перемещаться на колесах Handle более функционален по сравнению с другими моделями.
Интересно, что сам Марк Рэйберт, представляя робота инвесторам, назвал его «роботом из ночных кошмаров».
Сделка с Google
Первые 20 лет существования Boston Dynamics главным источником финансирования для компании была армия США. В 2013 году наряду с другими роботостроительными стартапами корпорация Google решила купить компанию Марка Рэйберта. Сумма сделки составила $500 млн. Однако в 2017 году Google перепродала компанию японской SoftBank. Журналисты и эксперты считают, что в Google и Boston Dynamics не нашли общего понимания стратегии: Google рассчитывала создать успешный коммерческий продукт, а инженеры хотели создавать все более совершенных роботов, не ориентируясь на успешность на рынке.
Softbank — новый владелец и новые перспективы

Покупателем Boston Dynamics оказалась японская корпорация SoftBank, которая вкладывает миллиарды долларов в различные сферы IT.
Японцы значительно позитивнее смотрят на человекоподобных роботов. Вероятно, руководству Boston Dynamics придется согласиться с таким подходом, и в ближайшем будущем мы увидим еще более реалистичных антропоморфных роботов.
После сделки с SoftBank в среде ученых и журналистов появились опасения, что корпорация будет навязывать Boston Dynamics свое видение, как развивать роботостроение. Некоторые эксперты призывают SoftBank не вмешиваться в разработку и позволить инженерам создавать роботов, которые пусть пока и не прибыльны, но зато наиболее совершенны и перспективны для развития этой отрасли в целом.
Boston Dynamics — американская инженерная компания, специализирующаяся на производстве роботов для военных, промышленных и бытовых целей. Глядя на эти изобретения, понимаешь, что будущее, каким его видели создатели «Терминатора», уже где-то рядом.

С чего начиналась компания Boston Dynamics
Начало «Бостон Динамикс» было положено в 1977 году, когда Майк Райбер в своей диссертации продемонстрировал новое устройство роботизированной конечности, которая позволяла бы механизмам быть более устойчивыми и мобильными. Эта инновация до сих пор используется в разработках компании.
Впоследствии Райбер возглавил лабораторию Массачусетского технологического университета, где объединил вокруг себя талантливых ученых и в 1992 году основал Boston Dynamics. Долгое время о работе организации было мало известно, хотя в этот период она активно сотрудничала с самим университетом и ведомством, занимающимся военными разработками — DARPA.
Широкую известность не только в профессиональной среде, но и у обычной публики компания приобрела после того, как в 2005 году в сеть попал ролик с испытаниями Big Dog, теперь уже знаменитого робота с четырьмя конечностями.
В 2013 году компанию купила корпорация Google, рассчитывая на коммерческую рентабельность проекта. Поняв, что в ближайшие несколько лет разработчики не смогут представить массово востребованный продукт, в 2017 г Google продал компанию крупному японскому инвестору SoftBank.
5 самых удивительных изобретений Boston Dynamics
Роботы «Бостон Динамикс» быстро совершенствуются и обучаются новым навыкам. Перечислим самые впечатляющие экземпляры.
- Handle — 2-метровый робот, отлично справляющийся с погрузкой коробок за счет мощных присосок на одной из своих конечностей. На «ногах» у него колеса, благодаря которым Handle быстро и маневренно двигается по ровной поверхности. Может он и спуститься по лестнице, и даже прыгнуть на высоту 1,2м, благодаря мощному гидравлическому приводу. Робот идеально удерживает баланс и координацию.
- WildCat, изначально Cheetah (в пер.с англ. — леопард) — первый робот из семейства «кошачьих» Boston Dynamics. Устройство отличается высокой скоростью (45 км/ч — рекорд среди роботов), способностью передвигаться галопом и рысью. Это стало возможным благодаря гибкой конструкции его «спины».
- Atlas — самый современный антропоморфный робот в линейке компании. Он может передвигаться по пересеченной местности на двух конечностях, прыгать с одного препятствия на другое, делать сальто, держать баланс на неустойчивой поверхности, переносить в «руках» предметы.
- Spot и SpotMini — уменьшенная версия Big Dog, в одном из вариантов снабженная рукой-манипулятором. Изначально робот разрабатывался для проведения спасательных операций, но в 2018 году в компании заявили о планах вывода модели робопса на коммерческий рынок. В продажу поступит усовершенствованная конструкция SpotMini с более прочным корпусом, защищающим от падений; рукой-манипулятором с пространственной стабилизацией; двумя камерами — спереди и сзади; продвинутой системой навигации. На этом видео, особенно полюбившемся пользователям, робопес демонстрирует свои умения в танце.
- RiSE — шестиногий робот, взбирающийся по вертикальным поверхностям. Его конечности оснащены множеством микрозацепов, позволяющих цепляться за бетон, дерево и различные покрытия. В длину RiSE — 25 см. Также в семейство мини-роботов «Бостон Динамикс» входит Sand Flea (земляная блоха), прыгающий на высоту 10м и робот-разведчик с высокой проходимостью RHex на шести конечностях в виде округлых дуг.
Эволюция роботов Boston Dynamics — это просто фантастика! Правда, до недавнего времени узнавать об успехах компании можно было только по видеороликам в сети. Теперь же, когда организация заявила о планах освоения коммерческого рынка, можно рассчитывать на появление роботов вокруг нас и популяризацию робототехники.
Источник: bostondynamics.com