Выбери правильные варианты ответов.
1. Работа силы является физической величиной.
2. Единица измерения работы (СИ):
- (1) ккал (килокалория)
- (1) кДж
- (1) Дж
- (1) Вт
- (1) лошадиная сила
3. Если тело совершает перемещение по горизонтальной шероховатой поверхности, то работа силы реакции опоры .
4. Механическая работа, совершаемая механизмом за конечный промежуток времени, характеризует его
.
|
5. Какая физическая величина вычисляется через площадь под графиком функции (F(t))? Ответ: . |
Рис. (1). Изображение графика |

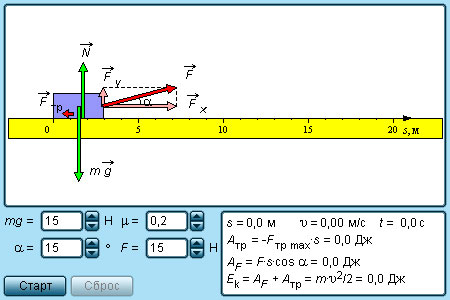
Энергетические характеристики движения вводятся на основе понятия механической работы или работы силы.
Если действующая на тело сила вызывает его перемещение s, то действие этой силы характеризуется величиной, называемой механической работой (или, сокращенно, просто работой).
Механическая работа А — скалярная величина, равная произведению модуля силы F, действующей на тело, и модуля перемещения s, совершаемого телом в направлении действия этой силы.
![]()
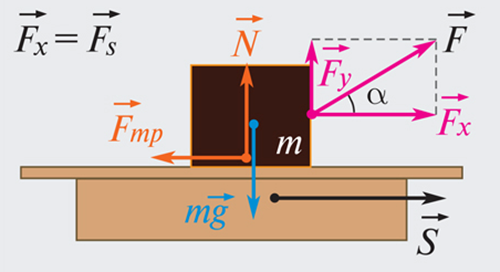
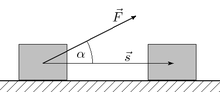
Если направления перемещения тела и приложенный силы не совпадают, то работу можно вычислить как произведение модулей силы и перемещения, умноженному на косинус угла α между векторами силы ![]() и перемещения
и перемещения ![]() (рис. 1.18.1):
(рис. 1.18.1):
![]()
Работа является скалярной величиной. Она может быть как положительной (0° ≤ α < 90°), так и отрицательной (90° < α ≤ 180°). При α = 90° работа, совершаемая силой, равна нулю. В системе СИ работа измеряется в джоулях (Дж).
Джоуль равен работе, совершаемой силой в 1 Н на перемещении 1 м в направлении действия силы.
|
|
|
Рисунок 1.18.1. Работа силы |
Если проекция ![]() силы
силы ![]() на направление перемещения
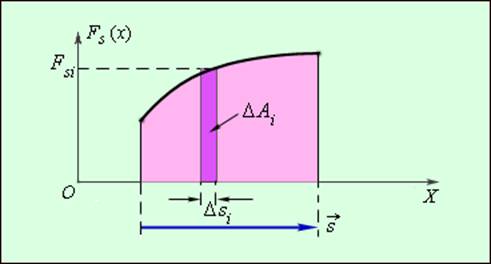
на направление перемещения ![]() не остается постоянной, работу следует вычислять для малых перемещений Δsi и суммировать результаты:
не остается постоянной, работу следует вычислять для малых перемещений Δsi и суммировать результаты:
![]()
Это сумма в пределе (Δsi → 0) переходит в интеграл.
Графически работа определяется по площади криволинейной фигуры под графиком Fs(x) (рис. 1.18.2).
|
|
|
Рисунок 1.18.2. Графическое определение работы. ΔAi = FsiΔsi |
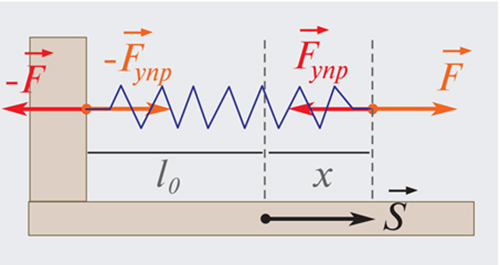
Примером силы, модуль которой зависит от координаты, может служить сила упругости пружины, подчиняющаяся закону Гука. Для того, чтобы растянуть пружину, к ней нужно приложить внешнюю силу ![]() модуль которой пропорционален удлинению пружины (рис. 1.18.3).
модуль которой пропорционален удлинению пружины (рис. 1.18.3).
|
|
|
Рисунок 1.18.3. Растянутая пружина. Направление внешней силы
k – жесткость пружины. |
Зависимость модуля внешней силы от координаты x изображается на графике прямой линией (рис. 1.18.4).
|
|
|
Рисунок 1.18.4. Зависимость модуля внешней силы от координаты при растяжении пружины |
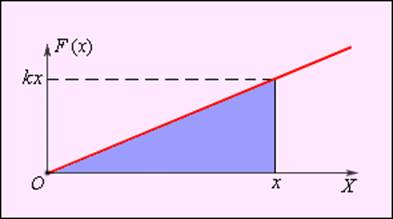
По площади треугольника на рис. 1.18.4 можно определить работу, совершенную внешней силой, приложенной к правому свободному концу пружины:

Этой же формулой выражается работа, совершенная внешней силой при сжатии пружины. В обоих случаях работа упругой силы ![]() равна по модулю работе внешней силы
равна по модулю работе внешней силы ![]() и противоположна ей по знаку.
и противоположна ей по знаку.
Если к телу приложено несколько сил, то общая работа всех сил равна алгебраической сумме работ, совершаемых отдельными силами. При поступательном движении тела, когда точки приложения всех сил совершают одинаковое перемещение, общая работа всех сил равна работе равнодействующей приложенных сил.
 |
|
Модель. Механическая работа. |
Мощность
Работа силы, совершаемая в единицу времени, называется мощностью. Мощность N это физическая величина, равная отношению работы A к промежутку времени t, в течение которого совершена эта работа:
![]()
В Международной системе (СИ) единица мощности называется ватт (Вт). Ватт равен мощности силы, совершающей работу в 1 Дж за время 1 с.
![]()
| Работа | |
 |
|
| Размерность |
L2MT−2 |
|---|---|
| Единицы измерения | |
| СИ |
Дж |
| СГС |
эрг |
| Примечания | |
|
скалярная величина |
| |
||||||
|
|
||||||
| Работа силы | ||||||
| Ключевые статьи | ||||||
|
||||||
| См. также: Портал:Физика |

Механическая работа — это физическая величина, являющаяся скалярной количественной мерой действия силы или сил на тело или систему, зависящая от численной величины, направления силы (сил) и от перемещения точки (точек) тела или системы[1].
Содержание
- 1 Определение
- 1.1 Работа силы (сил) над одной точкой
- 1.2 Работа силы (сил) над системой или неточечным телом
- 2 Кинетическая энергия
- 3 Потенциальная энергия
- 4 Работа в термодинамике
- 5 Работа силы в теоретической механике
- 6 Размерность и единицы
- 7 Ссылки
- 8 Литература
- 9 См. также
Определение
В механике можно ввести понятие работы, исходя из довольно простых представлений[2]
Работа силы (сил) над одной точкой
- Работа нескольких сил определяется естественным образом как работа их равнодействующей (их векторной суммы). Поэтому дальше будем говорить об одной силе.
![]()
При прямолинейном движении одной материальной точки и постоянном значении приложенной к ней силы работа (этой силы) равна произведению величины проекции вектора силы на направление движения и величины совершённого перемещения[3]:

Здесь точкой обозначено скалярное произведение[4],  — вектор перемещения; подразумевается, что действующая сила
— вектор перемещения; подразумевается, что действующая сила  постоянна в течение всего того времени, за которое вычисляется работа.
постоянна в течение всего того времени, за которое вычисляется работа.
Если сила не постоянна, то в этом случае она вычисляется как интеграл[5]:

(подразумевается суммирование по кривой, которая является пределом ломаной, составленной из последовательных перемещений  если вначале считать их конечными, а потом устремить длину каждого к нулю).
если вначале считать их конечными, а потом устремить длину каждого к нулю).
Если существует зависимость силы от координат[6], интеграл определяется[7] следующим образом:
 ,
,
 ,
,где  и
и  — радиус-векторы начального и конечного положения тела соответственно.
— радиус-векторы начального и конечного положения тела соответственно.
- Cледствие: если направление движения тела ортогонально силе, работа (этой силы) равна нулю.
Работа силы (сил) над системой или неточечным телом
Работа сил над системой материальных точек определяется как сумма работ этих сил над каждой точкой (работы, совершённые над каждой точкой системы, суммируются в суммарную работу этих сил над системой).
Даже если изначально тело не является системой дискретных точек, можно разбить его (мысленно) на множество бесконечно малых элементов (кусочков), каждый из которых считать материальной точкой, вычисляя работу в соответствии с определением выше. В этом случае дискретная сумма заменяется на интеграл.
- Эти определения могут быть использованы как для какой-то конкретной силы или класса сил — для вычисления именно их работы отдельно, так и для вычисления полной работы, совершаемой всеми силами, действующими на систему.
Кинетическая энергия
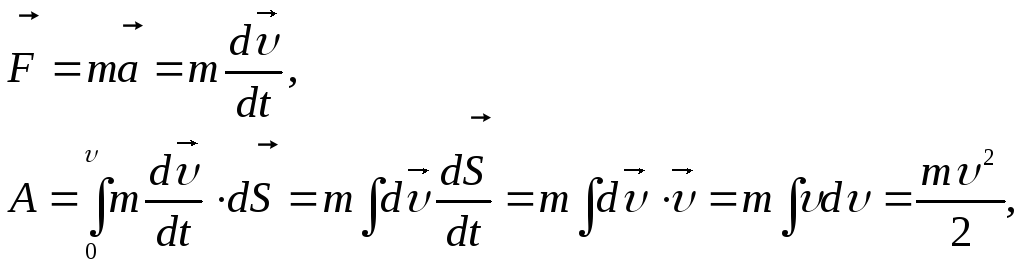
Кинетическая энергия вводится в механике в прямой связи с понятием работы.
Схема рассуждений такова: 1) попробуем записать работу, совершаемую всеми силами, действующими на материальную точку и, пользуясь вторым законом Ньютона (позволяющим выразить силу через ускорение), попытаться выразить ответ только через кинематические величины, 2) убедившись, что это удалось, и что этот ответ зависит только от начального и конечного состояния движения, введём новую физическую величину, через которую эта работа будет просто выражаться (это и будет кинетическая энергия).
Если  — полная работа, совершённая над частицей, определяемая как сумма работ совершенных приложенными к частице силами, то она выражается как:
— полная работа, совершённая над частицей, определяемая как сумма работ совершенных приложенными к частице силами, то она выражается как:

где  называется кинетической энергией. Для материальной точки, кинетическая энергия определяется как работа силы, ускорившей точку от нулевой скорости до величины скорости
называется кинетической энергией. Для материальной точки, кинетическая энергия определяется как работа силы, ускорившей точку от нулевой скорости до величины скорости  и выражается как:
и выражается как:

Для сложных объектов, состоящих из множества частиц, кинетическая энергия тела равна сумме кинетических энергий частиц.
Потенциальная энергия
Сила называется потенциальной, если существует скалярная функция координат, известная как потенциальная энергия и обозначаемая  , такая что
, такая что

Если все силы, действующие на частицу консервативны, и является полной потенциальной энергией, полученной суммированием потенциальных энергий соответствующих каждой силе, тогда:
 . . |
Этот результат известен как сохранение механической энергии и утверждает, что полная механическая энергия в замкнутой системе, в которой действуют консервативные силы

является постоянной относительно времени. Этот закон широко используется при решении задач классической механики.
Работа в термодинамике
В термодинамике работа, совершенная газом при расширении[8], рассчитывается как интеграл давления по объёму:

Работа, совершенная над газом, совпадает с этим выражением по абсолютной величине, но противоположна по знаку.
- Естественное обобщение этой формулы применимо не только к процессам, где давление есть однозначная функция объема, но и к любому процессу (изображаемому любой кривой в плоскости PV), в частности, к циклическим процессам.
- В принципе, формула применима не только к газу, но и к чему угодно, способному оказывать давление (надо только чтобы давление в сосуде было всюду одинаковым, что неявно подразумевается в формуле).
Эта формула прямо связана с механической работой. Действительно, попробуем написать механическую работу при расширении сосуда, учитывая, что сила давления газа будет направлена перпендикулярно каждой элементарной площадке, равна произведению давления P на площадь dS площадки, и тогда работа, совершаемая газом для смещения h одной такой элементарной площадки будет

Видно, что это и есть произведение давления на приращение объема вблизи данной элементарной площадкой. А просуммировав по всем dS получим конечный результат, где будет уже полное приращение объема, как и в главной формуле параграфа.
Работа силы в теоретической механике
Рассмотрим несколько детальнее, чем это было сделано выше, построение определения энергии как риманова интеграла.
Пусть материальная точка  движется по непрерывно дифференцируемой кривой
движется по непрерывно дифференцируемой кривой  , где s — переменная длина дуги,
, где s — переменная длина дуги, и на неё действует сила
и на неё действует сила  , направленная по касательной к траектории в направлении движения (если сила не направлена по касательной, то будем понимать под проекцию силы на положительную касательную кривой, таким образом сведя и этот случай к рассматриваемому далее). Величина
, направленная по касательной к траектории в направлении движения (если сила не направлена по касательной, то будем понимать под проекцию силы на положительную касательную кривой, таким образом сведя и этот случай к рассматриваемому далее). Величина  , называется элементарной работой силы
, называется элементарной работой силы  на участке
на участке  и принимается за приближенное значение работы, которую производит сила , воздействующая на материальную точку, когда последняя проходит кривую . Сумма всех элементарных работ
и принимается за приближенное значение работы, которую производит сила , воздействующая на материальную точку, когда последняя проходит кривую . Сумма всех элементарных работ  является интегральной суммой Римана функции .
является интегральной суммой Римана функции .
В соответствии с определением интеграла Римана, можем дать определение работе:
Предел, к которому стремится сумма всех элементарных работ, когда мелкость  разбиения
разбиения  стремится к нулю, называется работой силы вдоль кривой
стремится к нулю, называется работой силы вдоль кривой  .
.
Таким образом, если обозначить эту работу буквой  , то, в силу данного определения,
, то, в силу данного определения,
- ,
 ,
,следовательно,
- (1).
 (1).
(1).Если положение точки на траектории её движения описывается с помощью какого-либо другого параметра  (например, времени) и если величина пройденного пути
(например, времени) и если величина пройденного пути  ,
,  является непрерывно дифференцируемой функцией, то из формулы (1) получим
является непрерывно дифференцируемой функцией, то из формулы (1) получим
![W=intlimits_a ^b F[s(t)]s'(t)dt.](https://dic.academic.ru/dic.nsf/ruwiki/aac543b76b4a47af3ceecb90c8f18e3e.png)
Размерность и единицы
Единицей измерения работы в СИ является Джоуль, в СГС — эрг
- 1 Дж = 1 кг·м²/с² = 1 Н·м
- 1 эрг = 1 г·см²/с² = 1 дин·см
- 1 эрг = 10−7 Дж
Ссылки
- ↑ Концепции современного естествознания
- ↑ Такие представления можно конкретизировать как систему постулатов, приводящую достаточно однозначно к определению, описанному в основной статье:
- работу совершает только компонента силы, совпадающая с направлением перемещения точки, к которой она приложена, или противоположная направлению перемещения точки (в последнем случае работа считается отрицательной),
- работа постоянной силы пропорциональна компоненте такой силы, описанной в пункте 1, и длине вектора перемещения,
- работа по перемещению точки за несколько последовательных промежутков времени суммируется (работа за всё это время равна сумме работ, совершенных за каждый промежуток),
- работа суммы (векторной суммы) сил, приложенных к точке равна сумме работ, совершенных каждой силой в отдельности,
- работа, совершенная над системой (телом) равна сумме работ, совершенных над каждой ее частью (в частности — равна сумме работ, совершенных над каждой точкой системы).
- ↑ Механическая работа. Мощность
- ↑ Можно считать, что механическая работа может служить в области физики одной из главных иллюстраций для скалярного произведения.
- ↑ Это делается исходя из того, что можно разбить суммарное конечное перемещение на маленькие последовательные перемещения , на каждом из которых сила будет почти постоянной, а значит можно будет воспользоваться определением для постоянной силы, введенным выше. Затем работы на всех этих перемещениях суммируется, что и дает в результате интеграл.
- ↑ Как это очень часто бывает. Например, в случае кулоновского поля, растягивающейся пружины, силы тяготения планеты итд итд.
- ↑ По сути через предыдущий, поскольку здесь ; вектор же малого перемещения совпадает с .
- ↑ Работа, совершаемая газом при его сжатии, очевидно отрицательна, но вычисляется по той же формуле. Работа, совершаемая газом (или над газом) без его расширения или сжатия (например, в процессе перемешивания мешалкой), в принципе может быть выражена подобной формулой, но всё же не прямо этой, так как она требует обобщения: дело в том, что в формуле давление подразумевается одинаковым по всему объему (что часто выполняется в термодинамике, поскольку речь там часто идет о процессах, близких к равновесным), что и приводит к наиболее простой формуле (в случае же вращающейся мешалки, например, давление будет разным на передней и задней стороне лопасти, что приведет к необходимому усложнению формулы, если мы захотим применить ее к такому случаю; эти соображения относятся и ко всем другим неравновесным случаям, когда давление неодинаково в разных частях системы).
 , на каждом из которых сила будет почти постоянной, а значит можно будет воспользоваться определением для постоянной силы, введенным выше. Затем работы на всех этих перемещениях
, на каждом из которых сила будет почти постоянной, а значит можно будет воспользоваться определением для постоянной силы, введенным выше. Затем работы на всех этих перемещениях  ; вектор же малого перемещения
; вектор же малого перемещения  .
. давление подразумевается одинаковым по всему объему (что часто выполняется в термодинамике, поскольку речь там часто идет о процессах, близких к равновесным), что и приводит к наиболее простой формуле (в случае же вращающейся мешалки, например, давление будет разным на передней и задней стороне лопасти, что приведет к необходимому усложнению формулы, если мы захотим применить ее к такому случаю; эти соображения относятся и ко всем другим неравновесным случаям, когда давление неодинаково в разных частях системы).
давление подразумевается одинаковым по всему объему (что часто выполняется в термодинамике, поскольку речь там часто идет о процессах, близких к равновесным), что и приводит к наиболее простой формуле (в случае же вращающейся мешалки, например, давление будет разным на передней и задней стороне лопасти, что приведет к необходимому усложнению формулы, если мы захотим применить ее к такому случаю; эти соображения относятся и ко всем другим неравновесным случаям, когда давление неодинаково в разных частях системы).Литература
- Кудрявцев Л. Д. Курс математического анализа. — 5-е, переработанное и дополненное. — М.: Дрофа, 2003. — Т. 1. — С. 640—641. — 703 с.
См. также
- Закон сохранения энергии
- Механические приложения криволинейных интегралов
В данной теме речь пойдёт о механической
работе и мощности.
Механическая работа — это скалярная физическая величина,
которая характеризует процесс перемещения тела под действием силы. Под
действием постоянной силы тело двигается прямолинейно и совершает перемещение в
направлении действия силы, то сила совершает работу, равную произведению модуля
этой силы и модуля перемещения.
Из определения следует единица
измерения работы в метрической системе единиц
Эта единица названа в честь
английского ученого Джеймса Прескотта Джоуля, впервые экспериментально
обосновавшего эквивалентность работы и теплоты.
Это самый простой случай,
когда перемещение тела и сила, действующая на него, совпадают по направлению.
Теперь рассмотрим, как
вычисляется работа, когда направление действия силы не совпадает с направлением
перемещения тела. Для этого рассмотрим следующий опыт. Через блок перекинута
нить на которой висит брусок некоторой массы. На брусок действуют две силы —
сила тяжести и сила натяжения нити.
Если равномерно тянуть за
нить, то тело будет равномерно двигаться, и, следовательно, результирующая
сила, действующая на тело, будет равна нулю.
Значит, при некотором
перемещении тела работа результирующей силы тоже будет равна нулю.
Однако сила натяжения нити совершает
работу.
Поскольку при равномерном
движении сила натяжения нити по модулю равна силе тяжести тела, то можно
предположить, что сила тяжести совершает такую же работу по величине, но
отрицательную.
Отсюда можно сделать вывод: работа
силы может быть положительной, отрицательной или равной нулю.
Заметим, что сила тяжести по
направлению противоположна перемещению тела. Это обстоятельство и другие
соображения позволяют предложить общую формулу для работы постоянной силы при
равномерном прямолинейном движении. Если вектор силы и перемещения составляют
между собой угол a, то работа этой силы равна
произведению модуля силы на модуль перемещения и на косинус угла между ними.
Это и есть общее выражение для
работы постоянной силы.
Из этой формулы видно, что в
случае, когда угол между направлением вектора силы и вектора перемещения
острый, то косинус этого угла будет больше нуля и, следовательно, больше
нуля будет работа силы.
Если вектор силы и вектор
перемещения составляют между собой тупой угол, то значение косинуса
этого угла меньше нуля. Значит и работа этой силы будет отрицательна.
И, наконец, если вектор
силы перпендикулярен вектору перемещения, то работа не
совершается (вернее, работа этой силы равна нулю).
Если к движущемуся телу
приложено несколько сил, то каждая из них совершает работу, а общая работа
равна алгебраической сумме работ, совершаемых отдельными силами.
Работу, совершенную силой, можно найти и графически.
Так, если действие силы на тело не меняется с течением времени и совпадает по
направлению с перемещением, то работа этой силы численно равна
площади заштрихованного прямоугольника.
Если же сила изменяется в
процессе движения, то работа этой силы тоже будет численно равна площади под
кривой. В частности, на рисунке представлен график силы, которая линейно
уменьшается с пройденным расстоянием до нуля. Очевидно, что работа этой силы
на пройденном пути, численно равна площади треугольника.
Ранее говорилось, что
основными силами в механике являются гравитационные силы (в частности сила
тяжести), силы упругости и силы трения.
Проанализируем более подробно работы,
совершаемые каждой из этих сил. Начнем с работы силы тяжести. Будем ее
рассматривать считая, что тело находится на небольших расстояниях от
поверхности Земли. В этом случае сила тяжести будет постоянной по модулю равной
Пусть тело массой m
падает с некоторой высоты h1 до
высоты h2. Тогда модуль
перемещения тела равен разности этих высот
Так как направления
перемещения и силы совпадают, то работа силы тяжести положительна и равна
произведению модуля силы тяжести и разности высот.
Следует помнить, что высоты,
на которых находится тело, можно отсчитывать от любого уровня. Это может быть
уровень поверхности Земли, пола или поверхности стола. Высоту выбранного уровня
принимают равной нулю. Поэтому этот уровень называют нулевым. Так, если тело
падает с высоты h до нулевого уровня, то работа силы тяжести равна
Теперь выясним, какую работу
совершает сила тяжести, если тело движется не по вертикали. Для этого
рассмотрим движение тела по наклонной плоскости.
Пусть тело некоторой массы m
совершило перемещение, равное по модулю длине наклонной плоскости. Работа силы
тяжести в этом случае равна
Из рисунка видно, что
Поэтому работа силы тяжести в
этом случае также равна
Таким образом, получили для
работы силы тяжести такое же выражение, как и в случае движения тела по
вертикали. Отсюда следует главный вывод о том, что работа силы тяжести не
зависит от того, по какой траектории движется тело и всегда равна произведению
модуля силы тяжести на разность высот в начальном и конечном положениях тела.
Тогда очевидно, что если
тело движется по замкнутой траектории, где начальное и конечное положения
тела совпадают, то работа силы тяжести равна нулю. Напомним, что такие
силы, работа которых не зависит от формы траектории, а определяется только
начальным и конечным положениями тела в пространстве, называются потенциальными
или консервативными. Следовательно, сила тяжести — это консервативная
сила.
Теперь проанализируем работу,
совершаемую силой упругости. Сила упругости — это сила, возникающая при
деформации тела внешними воздействиями.
Рассмотрим систему, состоящую
из пружины и тела некоторой массы, лежащего на достаточно гладкой
горизонтальной поверхности. Левый конец пружины прикреплен к стене, а правый —
к телу. Направим ось икс так, как показано на рисунке.
Если тело сместить на
некоторое расстояние от положения равновесия, то пружина будет действовать на
него с силой упругости, направленной вправо. Модуль проекции этой силы на ось Ox
будет определяться на основании закона Гука.
Теперь отпустим тело. Тогда
под действием силы упругости пружины тело будет смещаться вправо.
При этом сила упругости будет
совершать работу. Предположим, что тело переместилось так, что расстояние от
положения равновесия стало х2. Очевидно, что тогда модуль
перемещения тела равен разности между начальной и конечной координатой тела.
Для нахождения работы,
совершенной пружиной по перемещению тела, необходимо учесть, что сила упругости
меняется, так как ее величина зависит от удлинения пружины. Воспользуемся
графиком зависимости модуля силы упругости от удлинения пружины.
Известно, что работа силы
численно равна площади под графиком силы. В рассматриваемом
случае это площадь трапеции, основаниями которой являются силы упругости
пружины в положении один и два, а высота — это перемещение тела.
Из полученной формулы следует,
что работа силы упругости пружины зависит только от координат начального и
конечного положений. Из рисунка видно, что х1 и х2
— это и удлинение пружины, и координаты ее конца в выбранной системе координат.
Следовательно, работа силы упругости не зависит от формы траектории. А если
траектория замкнута, то работа равна нулю. Таким образом, сила упругости
является потенциальной силой.
И проанализируем работу,
совершаемую силой трения. Рассмотрим тело, находящееся на некоторой поверхности
(например, брусок на поверхности стола).
Если толкнуть брусок, то он
придет в движение, однако, через некоторое время, остановится. В процессе
движения бруска на него действуют: сила тяжести, сила нормальной реакции опоры
и сила трения скольжения. Под действием этих трех сил и движется брусок.
Поскольку сила тяжести компенсируется силой нормальной реакции стола, то
равнодействующая сила равна действующей на брусок силе трения. А так как сила
трения направлена противоположна перемещению, то работа этой силы будет
отрицательной (так как косинус ста восьмидесяти градусов равен минус единице).
Из формулы следует, что работа
силы трения зависит от модуля перемещения тела. И даже если тело
вернется в исходную точку, то работа силы трения не будет равна нулю.
Такие силы, работа которых зависит от формы траектории движения тела и на
замкнутой траектории отличны от нуля, называются непотенциальными или диссипативными
(от латинского — рассеяние).
Однако не надо думать, что
работа сил трения всегда отрицательна. Ведь именно благодаря силе трения покоя
человек и различные машины движутся по Земле. Действительно, при ходьбе человек
действует на поверхность Земли с некоторой силой F1 (кроме силы нормальной реакции), а по третьему закону
Ньютона Земля действует на ногу человека с силой трения покоя, равной по модулю
силе воздействия человека, но противоположно направленной. Благодаря этой силе
человек движется. Сила трения покоя направлена также, как и скорость человека,
и, следовательно, работа этой силы положительна.
Таки образом, были рассмотрены
работы основных трех сил, с которыми чаще всего мы сталкиваемся в механике.
Однако, одна и та же работа в разных случаях может быть выполнена за различные
промежутки времени, то есть она может совершаться неодинаково быстро. Очевидно,
что чем меньшее времени требуется для выполнения данной работы, тем эффективнее
работает машина, механизм и прочее.
Величина, характеризующая
быстроту совершения работы, и равная отношению работы, совершаемой силой, к
промежутку времени, в течение которого она совершается, называется мощностью.
Исходя из определения видим,
что единицей измерения мощности является
Эта единица получила название Ватт,
в честь английского ученого Джеймса Уатта — изобретателя универсального
парового двигателя.
При движении любого тела на
него в общем случае действует несколько сил, каждая из которых совершает работу
и, следовательно, для каждой силы можно вычислить мощность. Так, если тело
движется прямолинейно и на него действует постоянная сила, то она совершает
работу, равную
Тогда мощность силы равна
отношению работы этой силы к промежутку времени.
Мощность силы также равна
произведению модуля силы на модуль скорости и на косинус угла между
направлениями вектора силы и вектора скорости.
По записанной формуле можно
рассчитывать и среднюю, и мгновенную мощности, подставляя значение средней или
мгновенной скорости.
Из полученной формулы следует,
что при заданной мощности мотора сила тяги тем меньше, чем больше скорость
движения. Вот почему водители автомобилей при подъеме в гору, когда нужна
наибольшая сила тяги, переключают двигатель на пониженную передачу.
И так, любой двигатель
или механическое устройство предназначены для выполнения определенной механической работы.
Эта работа называется полезной работой. Для двигателя автомобиля
— это работа по его перемещению, для токарного станка — работа по вытачиванию
детали.
Однако в любой машине, в
любом двигателе полезная работа всегда меньше той энергии, которая
затрачивается для приведения их в действие, потому что всегда существуют
силы трения, работа которых приводит к нагреванию каких-либо частей устройства.
А нагревание нельзя считать полезным результатом действия машины. Поэтому
каждое устройство характеризуется особой величиной, которая показывает,
насколько эффективно используется подводимая к нему энергия. Эта величина
называется коэффициентом полезного действия и обычно обозначается
греческой буквой h.
И так, коэффициентом
полезного действия называется отношение полезной работы, совершенной
машиной за некоторый промежуток времени, ко всей затраченной работе (или
подведенной энергии) за тот же промежуток времени.
Коэффициент полезного действия
обычно выражается в процентах. Поскольку и полезную, и затраченную работы можно
представить, как произведение мощности на промежуток времени в течение которого
работала машина, то
Основные выводы:
Рассмотрели важную физическую величины
– работу. Рассмотрели работы наиболее
часто встречающихся сил — силы тяжести, упругости и силы трения. Повторили
понятие мощности, а также вспомнили, что называют коэффициентом полезного
действия механизма.
Когда под действием
некоторой силы тело совершает перемещение,
то действие силы характеризуется
величиной, которая называется механической
работой.
Механическая
работа
— мера действия силы, в результате
которого тела совершают перемещение.
Р
 абота
абота
постоянной силы.
Если тело движется прямолинейно под
действием постоянной силы
![]() ,
,
составляющей некоторый угол
с направлением перемещения
![]()
(рис.1), работа равна произведению этой
силы на перемещение точки приложения
силы и на косинус угла
между векторами
![]() и
и
![]() ;
;
или работа равна скалярному произведению
вектора силы на вектор перемещения:
![]() .
.
1 Дж — работа,
совершаемая силой в 1Н при перемещении
на 1м в направлении действия силы.
-
если
— острый угол,
 ,
, ;
; -
если
— тупой угол,
,; -
если
 ,
, .
.


Работа
переменной силы.
Чтобы найти работу переменной силы,
пройденный путь разбивают на большое
число малых участков так, чтобы их можно
было считать прямолинейными, а действующую
в любой точке данного участка силу —
постоянной.
Элементарная
работа (т.е. работа на элементарном
участке
![]() )
)
равна
![]() ,
,
а вся работа переменной силы на всем
пути S
находится интегрированием:
![]() .
.
Для характеристики
быстроты совершения работы вводят
понятие мощности.
Мощность
постоянной силы
численно равна работе, совершаемой этой
силой за единицу времени.
![]() .
.
1 Вт- это мощность
силы, которая за 1 с совершает 1 Дж работы.
В случае переменной
мощности (за малые одинаковые промежутки
времени совершается различная работа)
вводится понятие мгновенной мощности:
![]() ,
,
где
![]() скорость
скорость
точки приложения силы.
Т.о.
мощность равна скалярному произведению
силы
![]() на
на
скорость
![]()
точки её приложения.
-
Кинетическая и
потенциальная энергии. Законы сохранения
энергии и импульса.
Все введенные
ранее величины характеризовали только
механическое движение. Однако форм
движения материи много, постоянно
происходит переход от одной формы
движения к другой. Необходимо ввести
физическую величину, характеризующую
движение материи во всех формах её
существования, с помощью которой можно
было бы количественно сравнивать
различные формы движения материи.
Энергия численно
равна максимальной работе, которую тело
может совершить, и измеряется в тех же
единицах, что и работа. При переходе
энергии из одного вида в другой нужно
подсчитать энергию тела или системы до
и после перехода и взять их разность.
Эту разность принято называть работой:
![]() .
.
Т. о., физическая
величина, характеризующая способность
тела совершать работу, называется
энергией.
Механическая
энергия тела может быть обусловлена
либо движением тела с некоторой скоростью,
либо нахождением тела в потенциальном
поле сил.
Кинетическая
энергия.
Энергия,
которой обладает тело вследствие своего
движения, называется кинетической.
![]()
Работа, совершенная
над телом, равна приращению его
кинетической энергии.
Найдем
эту работу для случая, когда равнодействующая
всех приложенных к телу сил равна
![]() .
.
![]() ,
,
![]()
Работа, совершенная
телом за счет кинетической энергии,
равна убыли этой энергии.
Потенциальная
энергия.
Если в каждой точке
пространства на тело воздействуют
другие тела с силой, величина которой
может быть различна в разных точках,
говорят, что тело находится в поле сил
или силовом поле.
Все силы в механике
подразделяются на консервативные и
неконсервативные (или диссипативные).
Силы,
работа которых не зависит от формы
траектории, а определяется только
начальным и конечным положением тела
в пространстве, называются консервативными.
Силы,
работа которых зависит от формы пути,
называются неконсервативными
(силы трения).
Потенциальной
энергией называют часть общей механической
энергии системы, которая определяется
только взаимным расположением тел,
составляющих систему, и характером сил
взаимодействия между ними. Потенциальная
энергия
— это энергия, которой обладают тела или
части тела вследствие их взаимного
расположения.
В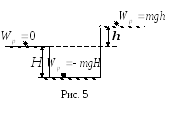 каждой конкретной задаче уславливаются
каждой конкретной задаче уславливаются
считать потенциальную энергию какого-то
определенного положения тела равной
нулю, а энергию других положений брать
по отношению к нулевому уровню. Конкретный
вид функции
![]()
зависит от характера силового поля и
выбора нулевого уровня. Поскольку
нулевой уровень выбирается произвольно,
![]()
может иметь отрицательные значения.
Например, если принять за нуль потенциальную
энергию тела, находящегося на поверхности
Земли, то в поле сил тяжести вблизи
земной поверхности потенциальная
энергия тела массой m,
поднятого на высоту h
над поверхностью, равна
![]()
(рис. 5).
Потенциальная
энергия этого же тела, лежащего на дне
ямы глубиной H,
равна
![]() .
.
В рассмотренном
примере речь шла о потенциальной энергии
системы Земля-тело.
Потенциальной
энергией может обладать не только
система взаимодействующих тел, но
отдельно взятое тело. В этом случае
потенциальная энергия зависит от
взаимного расположения частей тела.
![]() —
—
потенциальная энергия упругой деформации,
если принять, что потенциальная энергия
недеформированного тела равна нулю;
где
k
— коэффициент упругости, x
— деформация тела.
В общем случае
тело одновременно может обладать и
кинетической и потенциальной энергиями.
Сумма этих энергий называется полной
механической энергией тела:
![]()
Полная механическая
энергия системы равна сумме её кинетической
и потенциальной энергий. Полная энергия
системы равна сумме всех видов энергии,
которыми обладает система.
Механической
системой называется совокупность тел,
выделенная для рассмотрения. Тела,
образующие механическую систему, могут
взаимодействовать, как между собой, так
и с телами, не принадлежащими данной
системе. В соответствие с этим силы,
действующие на тела системы, подразделяют
на внутренние и внешние.
Внутренними
называются силы, с которыми тела системы
взаимодействуют между собой
Внешними называются
силы, обусловленные воздействием тел,
не принадлежащих данной системе.
Замкнутой
(или изолированной) называется система
тел, на которую не действуют внешние
силы.
Для
замкнутых систем оказываются неизменными
(сохраняются) три физических величины:
энергия, импульс и момент импульса. В
соответствии с этим имеют место три
закона сохранения: энергии, импульса,
момента импульса.
Закон сохранения
энергии — результат обобщения многих
экспериментальных данных. Идея этого
закона принадлежит Ломоносову, изложившему
закон сохранения материи и движения, а
количественная формулировка дана
немецким врачом Майером и естествоиспытателем
Гельмгольцем.
Закон
сохранения механической энергии:
в поле только консервативных сил полная
механическая энергия остается постоянной
в изолированной системе тел. Наличие
диссипативных сил (сил трения) приводит
к диссипации (рассеянию) энергии, т.е.
превращению её в другие виды энергии и
нарушению закона сохранения механической
энергии.
Закон
сохранения и превращения полной энергии:
полная энергия изолированной системы
есть величина постоянная.
Сумма
импульсов тел, составляющих механическую
систему, называется импульсом системы:
![]()
Для системы тел
внутренние силы, согласно третьему
закону Ньютона, попарно равны и
противоположно направлены, т.е. их
геометрическая сумма равна нулю.
Т.о.,
производная по времени импульса
механической системы равна геометрической
сумме внешних сил, действующих на
систему,
![]()
Для
замкнутой системы
![]()
![]() .
.
Закон
сохранения импульса:
импульс замкнутой системы материальных
точек остается постоянным.
Из этого закона
следует неизбежность отдачи при стрельбе
из любого орудия. Пуля или снаряд в
момент выстрела получают импульс,
направленный в одну сторону, а винтовка
или орудие получают импульс, направленный
противоположно. Для уменьшения этого
эффекта применяют специальные
противооткатные устройства, в которых
кинетическая энергия орудия превращается
в потенциальную энергию упругой
деформации и во внутреннюю энергию
противооткатного устройства.
Закон сохранения
импульса лежит в основе движения судов
(подводных лодок) при помощи гребных
колес и винтов, и водометных судовых
двигателей (насос всасывает забортную
воду и отбрасывает ее за корму). При этом
некоторое количество воды отбрасывается
назад, унося с собой определенный
импульс, а судно приобретает такой же
импульс, направленный вперед. Этот же
закон лежит в основе реактивного
движения.
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
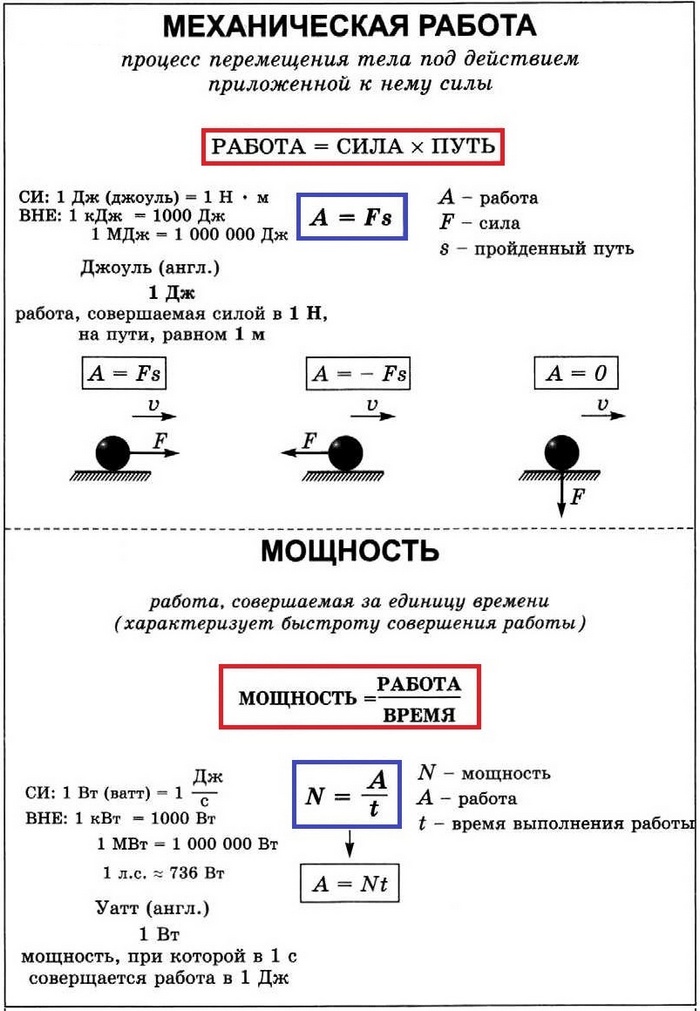
«Механическая работа. Механическая мощность»
Код ОГЭ 1.16. Механическая работа. Формула для вычисления работы силы. Механическая мощность.
Работа силы – физическая величина, характеризующая результат действия силы.
Механическая работа А постоянной силы ![]() равна произведению модуля вектора силы на модуль вектора перемещения
равна произведению модуля вектора силы на модуль вектора перемещения ![]() и на косинус угла а между вектором силы и вектором перемещения: А = Fs cos а.
и на косинус угла а между вектором силы и вектором перемещения: А = Fs cos а.
Единица измерения работы в СИ – джоуль: [А] = Дж = Н • м.
Механическая работа равна 1 Дж, если под действием силы в 1 Н тело перемещается на 1 м в направлении действия этой силы.
Анализ формулы для расчёта работы показывает, что механическая работа не совершается если:
- сила действует, а тело не перемещается;
- тело перемещается, а сила равна нулю;
- угол между векторами силы и перемещения равен 90° (cos a = 0).
Внимание! При движении тела по окружности под действием постоянной силы, направленной к центру окружности, работа равна нулю, так как в любой момент времени вектор силы перпендикулярен вектору мгновенной скорости.
Работа – скалярная величина, она может быть как положительной, так и отрицательной.
- Если угол между векторами силы и перемещения 0° ≤ а < 90°, то работа положительна.
- Если угол между векторами силы и перемещения 90° < a ≤ 180°, то работа отрицательна.
Работа обладает свойством аддитивности: если на тело действует несколько сил, то полная работа (работа всех сил) равна алгебраической сумме работ, совершаемых отдельными силами, что соответствует работе равнодействующей силы.
Примеры расчёта работы отдельных сил:
Работа силы тяжести: не зависит от формы траектории и определяется только начальным и конечным положением тела: A = mg(h1 – h2). По замкнутой траектории работа силы тяжести равна нулю.
Внимание! При движении вниз работа силы тяжести положительна, при движении вверх работа силы тяжести отрицательна.
Работа силы трения скольжения: всегда отрицательна и зависит от формы траектории. Если сила трения не изменяется по модулю, то её работа А = –Fтр l , где l – путь, пройденный телом (длина траектории). Очевидно, что чем больший путь проходит тело, тем большую по модулю работу совершает сила трения. Работа силы трения по замкнутой траектории не равна нулю!
Мощность N – физическая величина, характеризующая быстроту (скорость) совершения работы и равная отношению работы к промежутку времени, за который эта работа совершена: ![]() .
.
Мощность показывает, какая работа совершается за 1 с.
Единица измерения мощности в СИ – ватт: [ N ] = Дж/с = Вт.
Мощность равна одному ватту, если за 1 с совершается работа 1 Дж.
Может пригодиться! 1 л. с. (лошадиная сила) ~ 735 Вт.
Внимание! Для случая равномерного движения (равнодействующая сила равна нулю) при расчете мощности отдельных сил, действующих на тело, получим ![]() .
.
Для равноускоренного движения (F = const) ![]() где ʋср– средняя скорость движения за расчётный промежуток времени.
где ʋср– средняя скорость движения за расчётный промежуток времени.
Конспект урока «Механическая работа. Механическая мощность».
Следующая тема: «Кинетическая и потенциальная энергия» (код ОГЭ 1.17)



